
包括多軸傳感器,能為飛行器提供航向(heading direction)、翻滾(cross roll)和側翻(rollover)資訊。這些資訊可以被收集彙整在儀表板上 供飛行人員快速掌握目前飛行器本身狀態。也可以透過無線通訊呈現於自己手機或平板上,遠端操控或觀測。

以下先談一下AHRS和IMU的三個重要核心:
一、加速度計(accelerometer g-sensor):
量測相對於自由落體的加入度,有分單軸或多軸。可以知道加速度大小、方向、震動與衝擊度。評量加速度計的指標有 反應時間、敏感度、解析度、取樣比率、和錯誤率。SI制單位是 m/sec2,CGS制單位是GAL,一般就是自由落體加速度 g 來表示。
種類有:電容式加速度計、壓電式加速度計、壓阻式加速度計、霍爾效應加速度計、磁阻式加速度計、熱傳輸加速度計、MEMS、技術加速度計、奈米技術加速度計。
應用於測量汽車加速度,汽車碰撞和剎車系統、能量消耗的速率、監測電風扇壓縮機等旋轉設備、建築物結構監測、散步、跑步、跳舞、地震、測量心肺復甦、計步器、體能訓練、慣性導航系統、遊戲、螢幕方向、防震功能等。
二、磁力計(magnetometer, m-sensor, electrical compass):
磁力計分為兩種基本類型,純量磁力計(測量磁場的總強度),和向量磁力計(測量磁場在特定方向的分量)。在國際單位制中描述磁場的物理量是磁感應強度,單位是特斯拉。由於1特斯拉意味著非常強的磁場,地球科學上常用納特(nT)來作為測量單位,工程上常用的CGS制(厘米-克-秒制)中,單位則是高斯。在早期,電磁領域高斯單位盛行,因此磁強計也稱為高斯計。
能夠測量磁場的物理原理有很多,根據不同原理進行分類,常見純量磁強計原理有質子旋進磁強計,Overhauser磁強計,鹼金屬光泵磁強計等,常見的矢量磁強計有磁通門磁強計、磁阻磁強計、旋轉線圈磁力計、霍爾效應磁力計、質子磁力計、梯度儀、磁通門磁力計。
主要應用探測鐵的含量、偵測潛艇、考古、探勘石油與天然氣等。

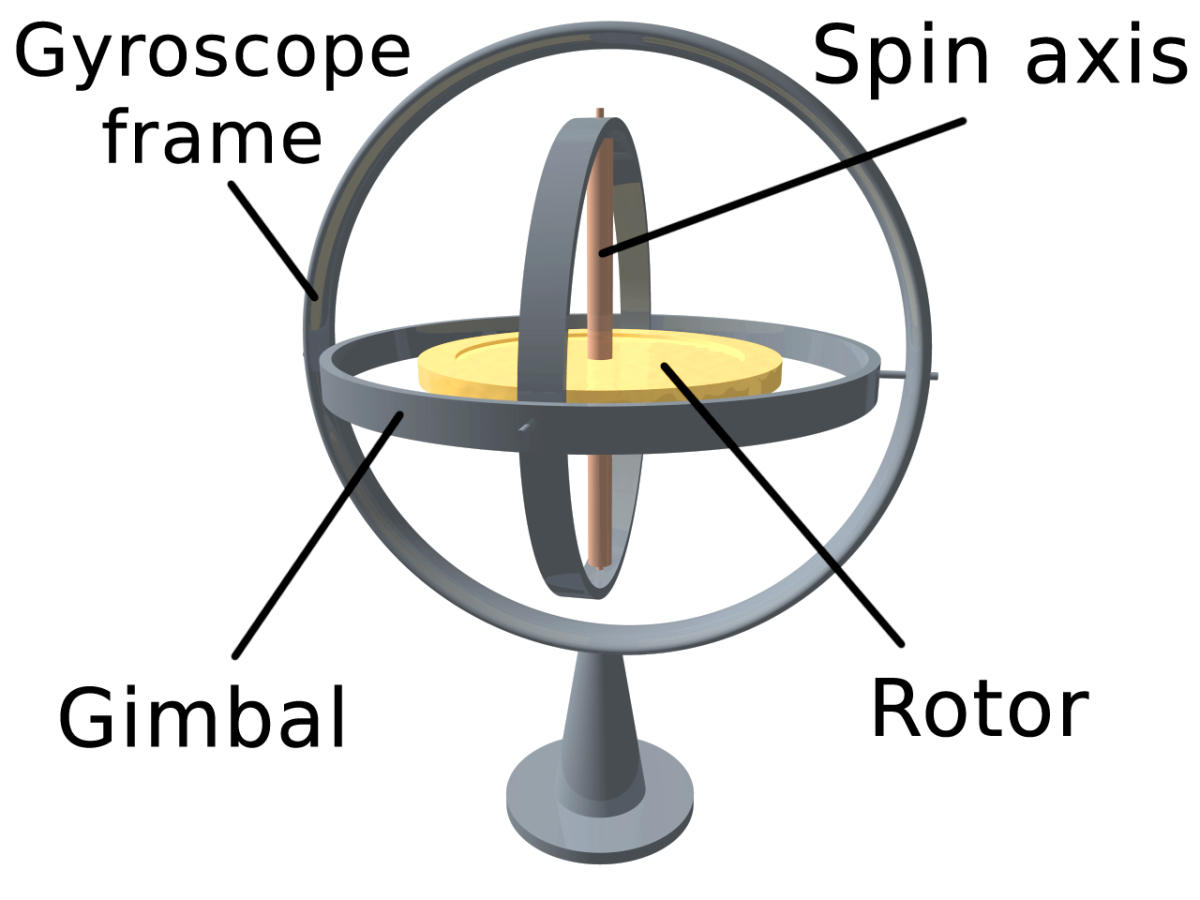
三、陀螺儀(gyroscope):
是一種用來感測與維持方向的裝置,基於角動量守恆的理論設計出來的。陀螺儀主要是由一個位於軸心且可旋轉的轉子構成。 陀螺儀一旦開始旋轉,由於轉子的角動量,陀螺儀有抗拒方向改變的趨向。多用於導航、定位等系統。
以上三種感測器好好運用,可以應用在不少地方。比如 mo-cap(Motion capture, 動作捕捉)就包含了IMU Sensor和 9-axis sensor(九軸感測器) 。mo-cap又稱為動態捕捉,可記錄處理人或其他物體動作的技術。它廣泛應用於軍事、娛樂、體育、醫療應用、電腦視覺以及機器人技術等諸多領域。在電影製作和電子遊戲開發領域,它通常是記錄人類演員的動作,並將其轉換為數字模型的動作,並生成二維或三維的電腦動畫。
當它捕捉面部或手指的細微動作時,它通常被稱為效能捕獲(performance capture)。在許多領域,動作捕捉有時也被稱為運動跟蹤(motion tracking),但在電影製作和遊戲開發領域,運動跟蹤通常是指符合移動(match moving)。
通常使用到 nordic 52832/40 + TDK icm 20948 等晶片。可以參考以下公司的產品。
https://www.xsens.com/products/mtw-awinda/
開發工具有:Keil , JTAG 和 J-Link 等。BSP 通常運作在 RTOS(Real-time operating system, RTOS) 系統上。
回到AHRS,AHRS內部採用的多傳感器數據融合進行的航姿解算單元為卡爾曼濾波器。一種高效率的遞歸濾波器(自回歸濾波器),能夠從一系列的不完全及包含雜訊的測量中,估計動態系統的狀態。
卡爾曼濾波的一個典型實例是從一組有限的,包含噪聲的,通過對物體位置的觀察序列(可能有偏差)預測出物體的位置的坐標及速度。在很多工程應用(如雷達、電腦視覺)中都可以找到它的身影。同時,卡爾曼濾波也是控制理論以及控制系統工程中的一個重要課題。
例如,對於雷達來說,人們感興趣的是其能夠跟蹤目標。但目標的位置、速度、加速度的測量值往往在任何時候都有噪聲。卡爾曼濾波利用目標的動態信息,設法去掉噪聲的影響,得到一個關於目標位置的好的估計。這個估計可以是對當前目標位置的估計(濾波),也可以是對於將來位置的預測,也可以是對過去位置的估計。
除了應用在飛行器外,也可用在自動車和無人機市場,或者像是攝影機的雲台等。動作捕捉。機器人。醫療產業。追蹤運動。車輛動態。通常可以透過藍牙進行人機通訊。